Posts Tagged with "RAMS"
既に発行済みのブログであっても適宜修正・追加することがあります。
We may make changes and additions to blogs already published.
posted by sakurai on October 1, 2021 #439
10/1までに査読に対応した修正を実施し、修正版を登録しました。
表439.1 RAMS 2022へのマイルストーン
| 年月日 |
マイルストーン |
状態 |
| 2021/8/1 |
論文、プレゼン投稿締め切り(名前、所属無し版) |
済 |
| 2021/9/1 |
第1回論文、プレゼン資料査読コメント受領 |
済 |
| 2021/9/15 |
改訂版論文、プレゼン投稿締め切り(名前、所属無し版) |
済 |
| 2021/10/1 |
最終査読コメント受領 |
済 |
| 2021/10/10 |
学会出席登録締め切り |
済 |
| 2021/10/10 |
最終論文、プレゼン投稿締め切り(名前、所属有り版) |
|
表439.1はRAMS 2022正式採択までのマイルストーンであり、今後適宜更新します。
 前のブログ
次のブログ
前のブログ
次のブログ
posted by sakurai on September 12, 2021 #435
予定どおり、9/15までに査読に対応した修正を登録しました。
表435.1 RAMS 2022へのマイルストーン
| 年月日 |
マイルストーン |
状態 |
| 2021/8/1 |
論文、プレゼン投稿締め切り(名前、所属無し版) |
済 |
| 2021/9/1 |
第1回論文、プレゼン資料査読コメント受領 |
済 |
| 2021/9/15 |
改訂版論文、プレゼン投稿締め切り(名前、所属無し版) |
済 |
| 2021/?/? |
学会出席登録締め切り |
|
| 2021/10/1 |
最終査読コメント受領 |
|
| 2021/10/10 |
最終論文、プレゼン投稿締め切り(名前、所属有り版) |
|
表435.1はRAMS 2022正式採択までのマイルストーンであり、今後適宜更新します。
前のブログ
次のブログ
posted by sakurai on September 1, 2021 #433
予定どおり、8/31にレビュー者3名によるレビュー結果を受領しました。次のマイルストーンは9/15までにその対応の修正を登録することです。
表433.1はRAMS 2022正式採択までのマイルストーンであり、今後適宜更新します。
表433.1 RAMS 2022へのマイルストーン
| 年月日 |
マイルストーン |
状態 |
| 2021/8/1 |
論文、プレゼン投稿締め切り(名前、所属無し版) |
済 |
| 2021/9/1 |
第1回論文、プレゼン資料査読コメント受領 |
済 |
| 2021/9/15 |
改訂版論文、プレゼン投稿締め切り(名前、所属無し版) |
|
| 2021/?/? |
学会出席登録締め切り |
|
| 2021/10/1 |
最終査読コメント受領 |
|
| 2021/10/10 |
最終論文、プレゼン投稿締め切り(名前、所属有り版) |
|
前のブログ
次のブログ
posted by sakurai on August 2, 2021 #428
表428.1はRAMS 2022正式採択までのマイルストーンであり、今後適宜更新します。
表428.1 RAMS 2022へのマイルストーン
| 年月日 |
マイルストーン |
状態 |
| 2021/8/1 |
論文、プレゼン投稿締め切り(名前、所属無し版) |
済 |
| 2021/9/1 |
第1回論文、プレゼン資料査読コメント受領 |
|
| 2021/?/? |
改訂版論文、プレゼン投稿締め切り(名前、所属無し版) |
|
| 2021/?/? |
学会出席登録締め切り |
|
| 2021/?/? |
最終査読コメント受領 |
|
| 2021/10/10 |
最終論文、プレゼン投稿締め切り(名前、所属有り版) |
|
前のブログ
次のブログ
posted by sakurai on June 15, 2021 #421
前稿でご紹介した、2022年1月24日からアリゾナ州ツーソンのヒルトンホテルで開催される予定のRAMS 2022(68th Annual Reliability and Maintainability Symposium)に、弊社代表が投稿した論文のアブストラクトが採択されたとの連絡が届きました。まだ正式採択ではないため、8月の締め切りに向け論文をブラッシュアップしていくことになります。
表421.1はRAMS 2022正式採択までのマイルストーンであり、今後適宜更新します。
表421.1 RAMS 2021へのマイルストーン
| 年月日 |
マイルストーン |
状態 |
| 2021/8/1 |
論文、プレゼン投稿締め切り(名前、所属無し版) |
|
| 2021/9/1 |
第1回論文、プレゼン資料査読コメント受領 |
|
| 2021/?/? |
改訂版論文、プレゼン投稿締め切り(名前、所属無し版) |
|
| 2021/?/? |
学会出席登録締め切り |
|
| 2021/?/? |
最終査読コメント受領 |
|
| 2021/10/10 |
最終論文、プレゼン投稿締め切り(名前、所属有り版) |
|
前のブログ
次のブログ
posted by sakurai on June 11, 2021 #419
IEEE Reliability Societyの主催するRAMS 2021が先月(5月)末に終わり、主催者からプログラムの発表がありました。
 図419.1 RAMS 2021の様子
図419.1 RAMS 2021の様子
前稿でご紹介したように、弊社の発表は2021年5月24日午後13:30からの2C
のうち最初のセッション2C-01でした。しかしながら、米国から日本への出国が禁止となったため、米国出張を自粛したことにより、事前録画の再生及びポスター発表のみとなりました。論文は上記のリンクから取得可能です。
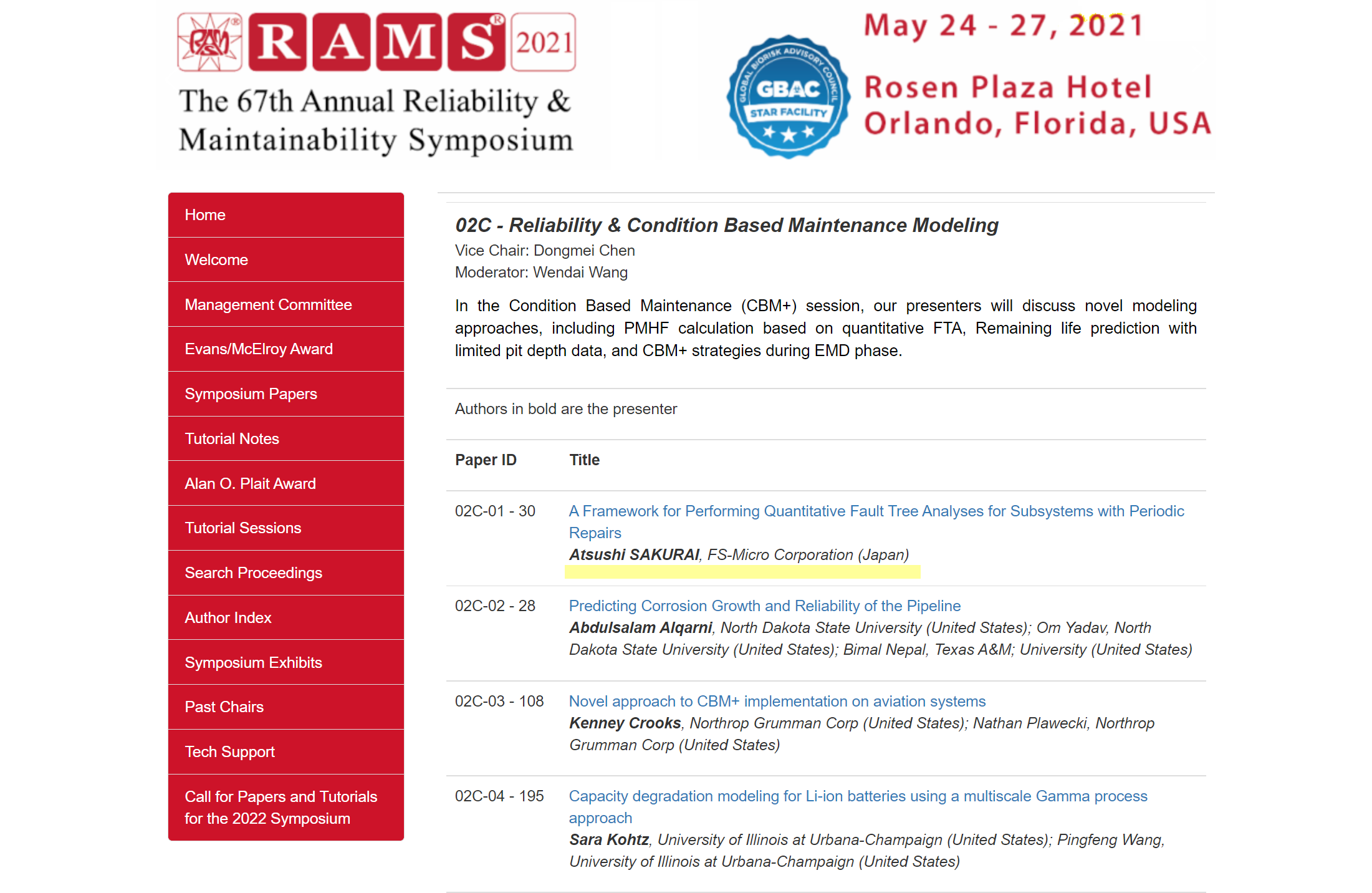 図419.2 弊社セッション2C-01
図419.2 弊社セッション2C-01
前のブログ
次のブログ
posted by sakurai on March 11, 2021 #378
今年5月に延期されたRAMS 2021について、プログラム表を示します。図378.1が昨年12月の暫定版、図378.2が最近の変更版ですが、虫食い状態となっています。これはCovid-19にもかかわらず、onlineとはせずにin-personカンファレンスとしたことによるものと思われます。
図378.1は昨年12月の暫定版です。弊社発表枠は初日の「Reliability Modeling 1」(オレンジ色表示)でした。DCはセッションチェアのDongMei Chengのイニシャルでした。
 図378.1 RAMS 2021プログラム表(2020年12月)
図378.1 RAMS 2021プログラム表(2020年12月)
図378.2は最近の変更版です。弊社発表枠は同時間枠の「Reliability & CBM Modeling」(オレンジ色表示)のようです。
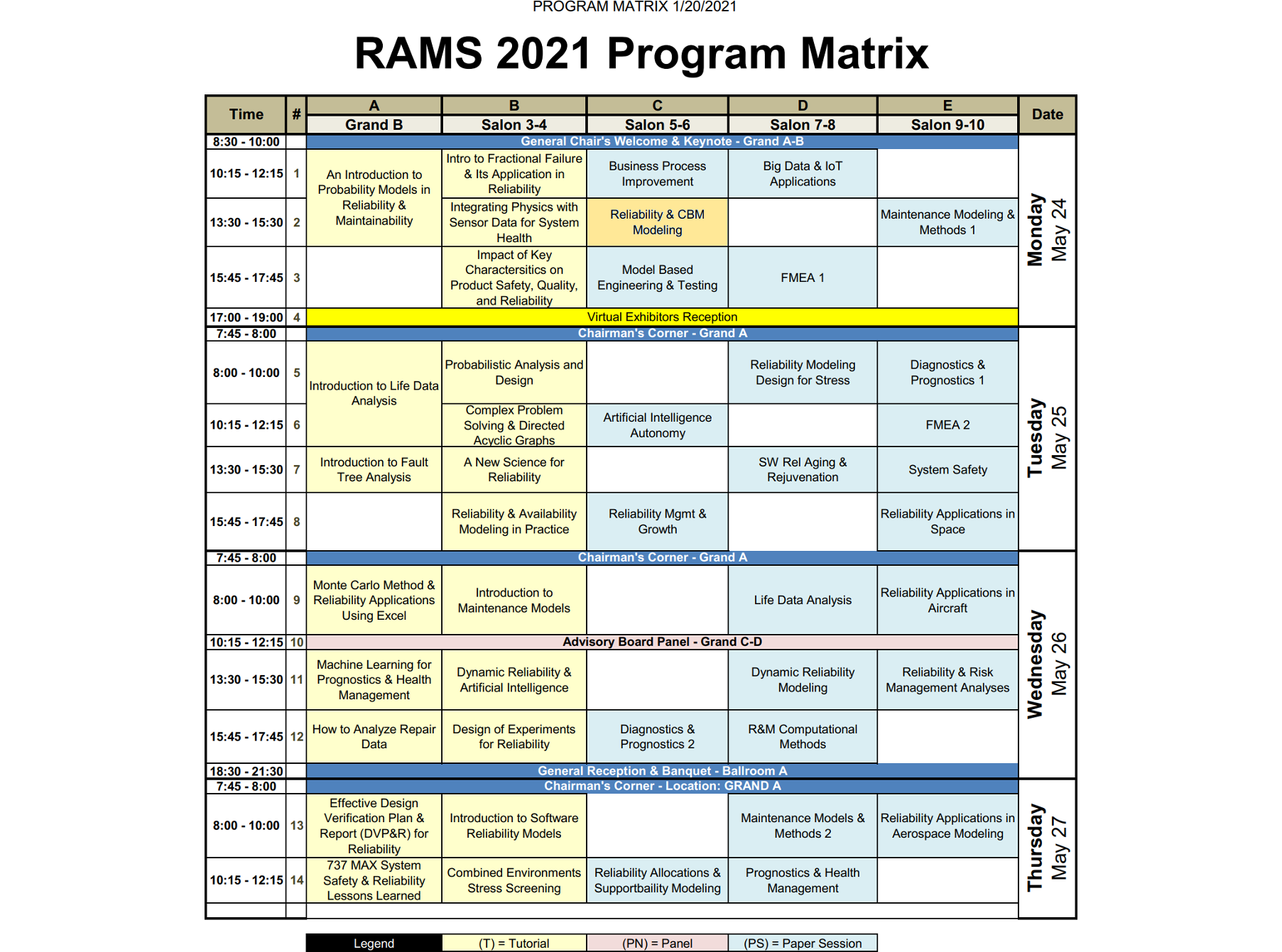 図378.2 RAMS 2021プログラム表(2021年3月)
図378.2 RAMS 2021プログラム表(2021年3月)
前のブログ
次のブログ
posted by sakurai on March 10, 2021 #377
今年のIEEE信頼性学会であるRAMS 2021は当初の1月から5月に延期されました。一方、来年のRAMSの日程が発表され、当初の1月に戻りました。場所はアリゾナ州ツーソンのヒルトンホテルです。
論文のアブストラクトの締め切りは本年4/16であり、弊社では今年も投稿予定です。
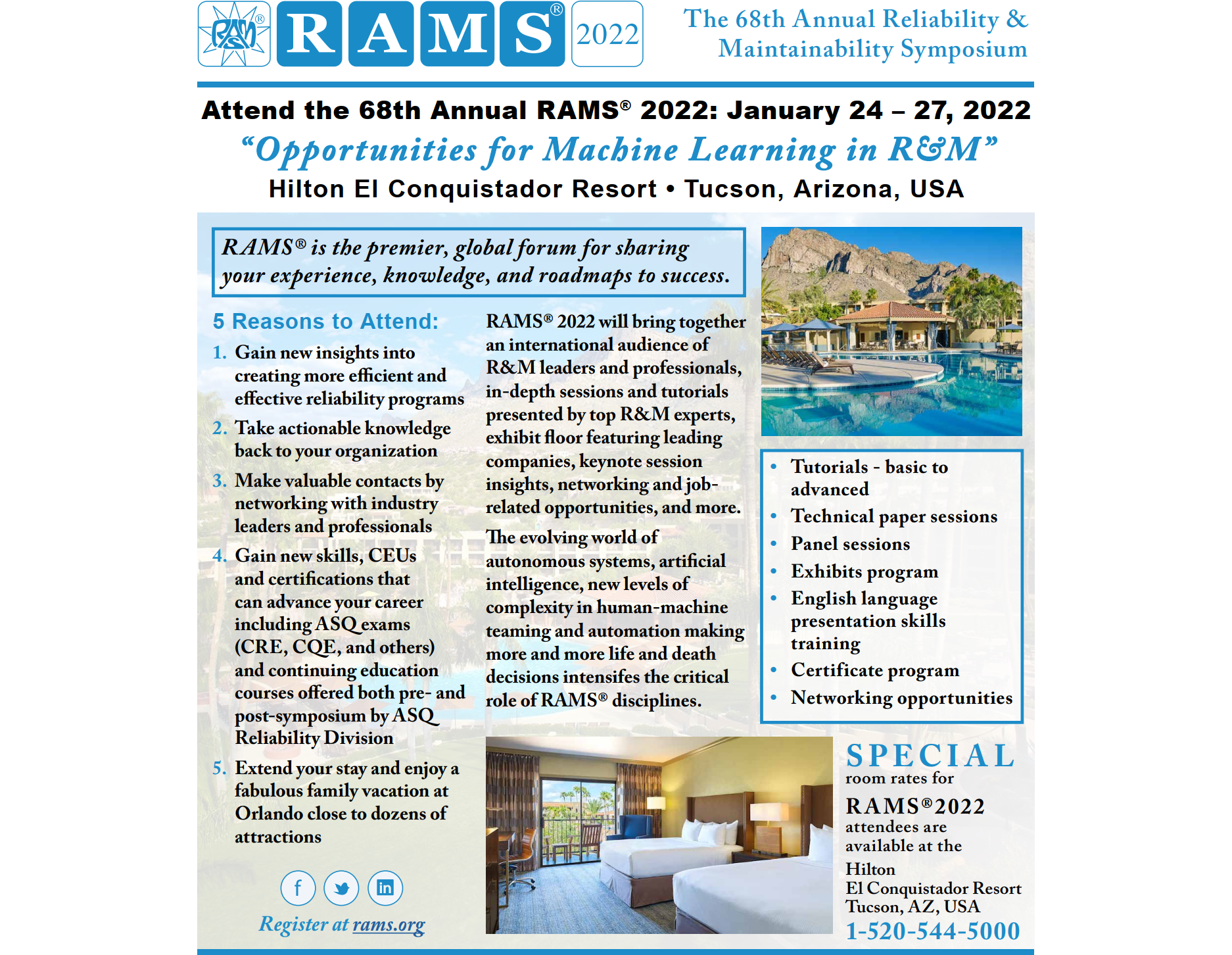 図377.1 RAMS 2021
図377.1 RAMS 2021
No.5のオーランド(フロリダ州)はツーソン(アリゾナ州)の誤りのようです。
前のブログ
次のブログ
posted by sakurai on January 19, 2021 #346
第5節は、前節で求めたPMHFの評価です。図のレイアウト上、空白が多めになっています。
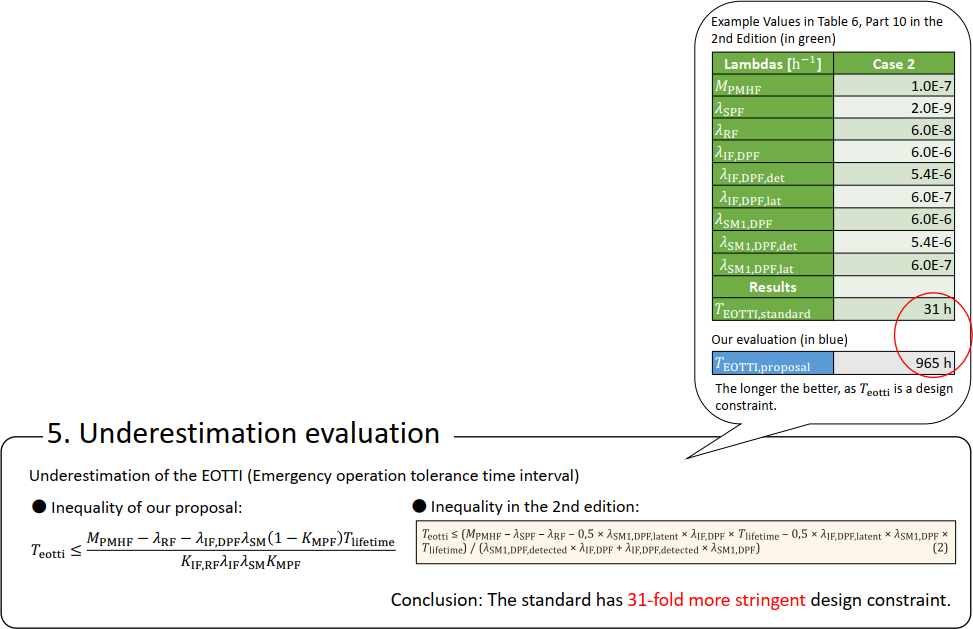
規格はケース見落としにより、過剰なPMHFの見積もりとなっています。ということは保守的な見積もりであるため、安全側ではありますが、EOTTIとしてはその過剰見積もりが厳しい設計制約として見えてきます。
上図左は弊社による、EOTTIの最大値を示す不等式です。一方、上図右は、2nd editionに掲載されているEOTTIの最大値を示す不等式です。表に示すように、規格自体に含まれている例で計算すると、規格がPMHFを過大に見積もっていることから、EOTTIも過小見積もりとなっています。正しくは965時間で良いのに、規格式では31時間となり、その倍率は31倍ともなります。
結論として、規格に従えば、PMHFが保守的な見積もりであることから、EOTTIに関して31倍も設計が厳しくなります。
前のブログ
次のブログ
posted by sakurai on January 13, 2021 #345
RAMS委員会から本日(2021年1月13日)連絡があり、本年1月末にフロリダ州オーランドで開催予定だったRAMS 2021は約4か月延期され、5月末同場所で開催されることになりました。詳細は以下の通りです。

前のブログ
次のブログ
ページ:
